
Page 25 - 仁濟醫院靚次伯紀念中學2019
P. 25
STEM @LCP Makerspace
教材分享:
親手製遙控智能車(五)
郭志文副校長
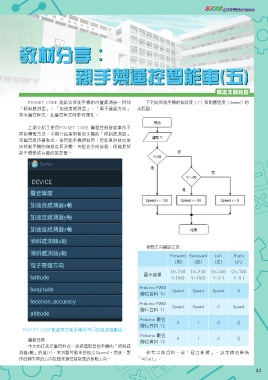
POCKET CODE 能結合智能手機的內置感測器,例如 下列是智能手機的傾斜度(Y)和對應速度(Speed)的
「傾斜感測器」、「加速度感測器」、「電子羅盤方向」 流程圖:
等來編寫程式,使編寫程式時更有彈性。
上期介紹了使用POCKET CODE 編程控制智能車作不
同的轉彎方法,今期介紹運用智能手機的「傾斜感測器」
來編寫遙控器程式。當智能手機傾斜時,智能車的速度會
按智能手機的傾斜度而改變,再配合方向按鈕,便能把智
能手機變成有趣的遙控器。
移動方向鍵設定表:
Forward Backward Left Right
(前) (後) (左) (右)
(X:-230 (X:-230 (X:-330 (X:-130
圖示座標
Y:100) Y:-100) Y: 0 ) Y: 0 )
Arduino PWM Speed Speed Speed 0
腳位資料 10
Arduino PWM Speed Speed 0 Speed
腳位資料 11
Arduino 數位 0 1 0
腳位資料 12 0
POCKET CODE能讀取智能手機內不同的感測器數據。
Arduino 數位
編程任務 腳位資料 13 0 1 0 0
本文的任務是編寫程式,透過讀取智能手機的「傾斜感
測器y軸」的值(Y),來判斷智能車的速度(Speed)。然後,製 參考早前資料,按「建立新檔」,設定檔名稱為
作四個不同的方向按鈕來操控智能車的移動方向。 「AICar3」。
23